fci架构示意图概述
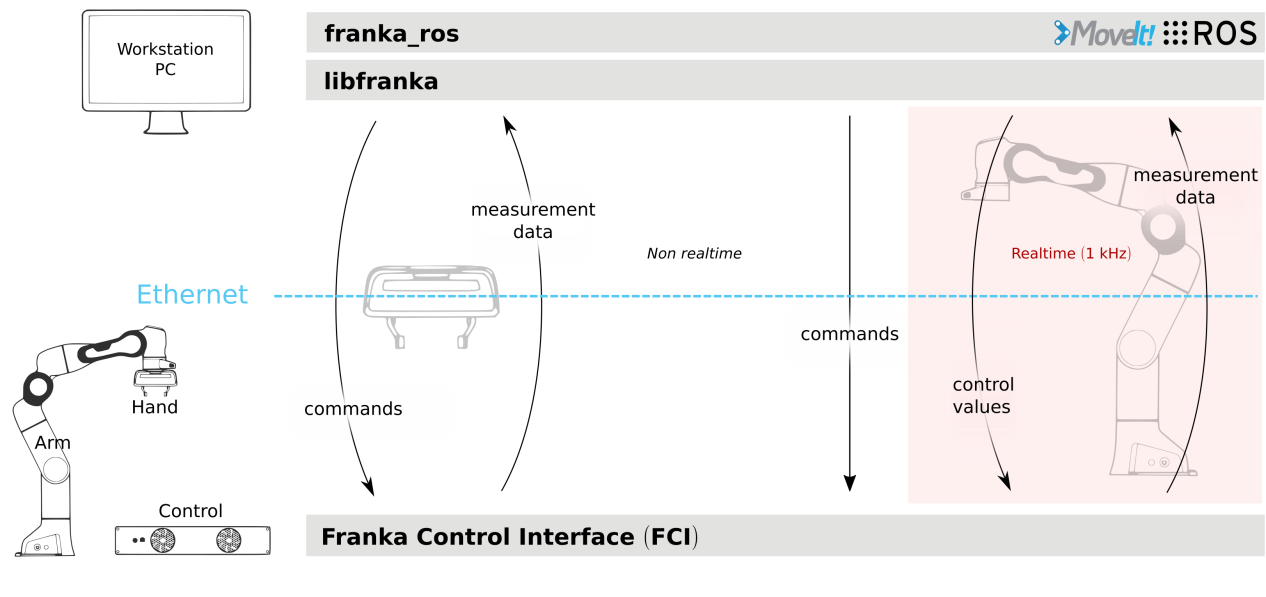
Franka控制接口(FCI)允许与手臂和手进行快速直接的低级双向连接。它提供机器人的当前状态,并通过以太网连接的外部工作站PC实现其直接控制。通过使用我们的开源 C++接口libfranka,您可以使用5种不同的接口以1 kHz的频率发送实时控制值:
重力和摩擦补偿关节空间扭矩命令
关节角度或速度命令
笛卡尔位姿或速度命令
同时,您可以使用1 kHz获得:
测量的关节数据,例如角度、角速度和连杆侧扭矩传感器信号
估计外部施加的扭矩和扭力
各种碰撞和接触信息
您还可以访问机器人模型库model library,该库提供:
所有机器人关节的正向运动学
所有机器人关节的雅可比矩阵
动力学方面:惯性矩阵、科式力项和离心矢量项和重力矢量项
此外,franka_ros 将Franka Emika科研版机器人与整个ROS生态系统连接起来。它将 libfranka集成到ROS Control中。此外,它还包括我们的机器人和末端执行器的URDF 模型和详细3D网格,可实现可视化(例如 RViz)和运动学模拟。MoveIt!集成使移动机器人和控制抓手变得容易,提供的示例程序向您展示了如何使用ROS控制您的机器人。
重要
数据以1 kHz的频率通过网络发送,因此,良好的网络连接是必要的!
重要
当FCI处于活动状态时,您可以完全、排他地控制手臂和抓手。这意味着您不能在使用Desk或Apps的同时使用FCI。
